
Initiale Bauteilvermessung und Vergleich mit CAD
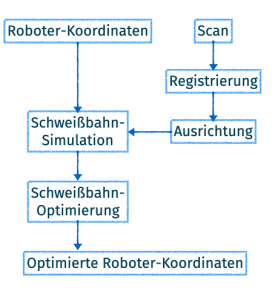
Das Ziel von 5GROW ist die Optimierung der von einem Schweißroboter durchgeführten Schweißbahnen in zwei Stufen. Die erste Stufe der Optimierung wird hier in diesem Artikel erklärt und erfolgt auf Basis von 3D-Scans der realen Bauteile. Aufgrund von Toleranzen zwischen den Komponenten können die Positionen der notwendigen Schweißbahnen in der Realität von der Planung abweichen. Dadurch sind Korrekturen notwendig, die algorithmisch vor dem Schweißen berechnet werden.
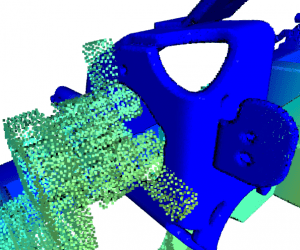
Für die erste Stufe der Optimierung werden die CAD-Modelle der Bauteile als Ideal angesehen und die 3D-Scans der realen Teile an die CAD-Modelle angepasst werden. Die quelloffene Bibliothek „open3d“ ermöglicht den Vergleich der gescannten Teile mit den CAD-Modellen. In der „Registrierung“ werden zwei ähnliche aus den Bauteilen erzeugte Punktwolken übereinander gelegt und der algorithmische und visuelle Vergleich der Passform ermöglicht. Dazu werden die Punktwolken des gescannten und modellierten Bauteils durch einen Registrierungsalgorithmen aneinander angepasst.
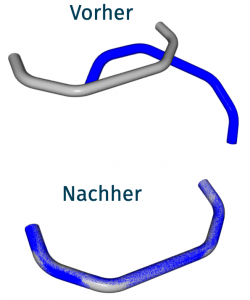
In einem weiteren Schritt werden die registrierten Teile nach ihren realen Maßen in der Schweißapparatur des Schweißroboters ausgerichtet. Mithilfe von k-means Clustering wird eine Separation der Berührungspunkte und Auflageflächen zwischen der Schweißvorrichtung und den Bauteilen erreicht. Diese so bestimmten Punkte werden daraufhin aneinander angepasst, indem die Distanzen zwischen den Auflageflächen minimiert werden. Somit wird eine Anpassung der Teile an die virtuelle Vorrichtung erreicht.
Nach erfolgreicher Ausrichtung der Bauteile werden die ungefähren Schweißnahtpositionen als Ausgangslage benutzt. Die erforderlichen Koordinaten der Schweißnahtpositionen sollen später aus den vorhandenen Schweißprogrammen des Roboters extrahiert werden. Diese Nahtpositionen werden an die realen Scans der Teile in der Schweißvorrichtung angepasst. Dazu wird in einer iterativen Optimierung die Distanz der Schweißnaht zu den beiden zu verbindenden Bauteilen minimiert. Die mithilfe der Optimierung angepassten Parameter beinhalten die notwendige Translation und einen Radius im Falle von runden Nähten. Weiterhin respektiert der Algorithmus eine minimale Distanz der Schweißbahn zu den Bauteilen.
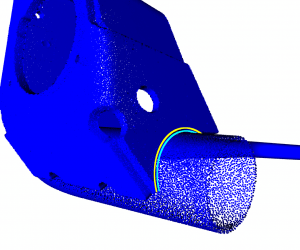
Grob eingegebene Schweißnaht (gelb) und angepasste Schweißnaht (hellblau)